在 openEuler 22.03 SP2 上安装 ROS humble
openEuler 22.03 SP2 即将发布,SP2 版本引入了 ROS humble 的支持,可以方便的使用 dnf install ros-humble-xxx 来安装 ros 包。下面是在 QEMU 虚拟机上进行的步骤演示~
以下使用 rc6 版本进行演示,正式版发布后,可省略更换软件源的步骤
下载 openEuler 虚拟机镜像,可前往此处查看
axel -n 64 http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/virtual_machine_img/x86_64/openEuler-22.03-LTS-SP2-x86_64.qcow2.xz # 解压 unxz openEuler-22.03-LTS-SP2-x86_64.qcow2.xz
Tips: 使用
axel等多线程下载工具可以显著提升下载速度启动 openEuler 虚拟机
以下脚本可以方便的使用
qemu-system-x86启动虚拟机并配置好端口映射,方便 使用 ssh 连入。#!/usr/bin/env bash # The script is created for starting a riscv64 qemu virtual machine with specific parameters. RESTORE=$(echo -en '\001\033[0m\002') YELLOW=$(echo -en '\001\033[00;33m\002') ## Configuration vcpu=8 memory=16 memory_append=`expr $memory \* 1024` drive="$(ls *.qcow2)" ssh_port=12055 cmd="qemu-system-x86_64 \ -smp "$vcpu" -m "$memory"G \ -drive file="$drive",format=qcow2,id=hd0 \ -nic user,model=virtio,hostfwd=tcp::"$ssh_port"-:22" echo ${YELLOW}:: Starting VM...${RESTORE} echo ${YELLOW}:: Using following configuration${RESTORE} echo "" echo ${YELLOW}vCPU Cores: "$vcpu"${RESTORE} echo ${YELLOW}Memory: "$memory"G${RESTORE} echo ${YELLOW}Disk: "$drive"${RESTORE} echo ${YELLOW}SSH Port: "$ssh_port"${RESTORE} echo "" echo ${YELLOW}:: NOTE: Make sure ONLY ONE .qcow2 file is${RESTORE} echo ${YELLOW}in the current directory${RESTORE} echo "" echo ${YELLOW}:: Tip: Try setting DNS manually if QEMU user network doesn\'t work well. ${RESTORE} echo ${YELLOW}:: HOWTO -\> https://serverfault.com/a/810639 ${RESTORE} echo "" sleep 2 eval $cmd
将上诉脚本保存至镜像文件同目录,并添加可执行权限,然后执行此脚本就可以启动 openEuler 虚拟机,虚拟机的
22号端口被映射到本机的12055号端口。配置软件源
使用 ssh 登入虚拟机
root账户,其密码是openEuler12#$配置软件源,编辑
/etc/yum.repos.d/openEuler.repo文件,更换为以下内容:#generic-repos is licensed under the Mulan PSL v2. #You can use this software according to the terms and conditions of the Mulan PSL v2. #You may obtain a copy of Mulan PSL v2 at: # http://license.coscl.org.cn/MulanPSL2 #THIS SOFTWARE IS PROVIDED ON AN "AS IS" BASIS, WITHOUT WARRANTIES OF ANY KIND, EITHER EXPRESS OR #IMPLIED, INCLUDING BUT NOT LIMITED TO NON-INFRINGEMENT, MERCHANTABILITY OR FIT FOR A PARTICULAR #PURPOSE. #See the Mulan PSL v2 for more details. [OS] name=OS baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/OS/$basearch/ enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/OS/$basearch/RPM-GPG-KEY-openEuler [everything] name=everything baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/everything/$basearch/ enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/everything/$basearch/RPM-GPG-KEY-openEuler [EPOL] name=EPOL baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/EPOL/main/$basearch/ metalink=https://mirrors.openeuler.org/metalink?repo=$releasever/EPOL/main&arch=$basearch metadata_expire=1h enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/OS/$basearch/RPM-GPG-KEY-openEuler [debuginfo] name=debuginfo baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/debuginfo/$basearch/ metalink=https://mirrors.openeuler.org/metalink?repo=$releasever/debuginfo&arch=$basearch metadata_expire=1h enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/debuginfo/$basearch/RPM-GPG-KEY-openEuler [source] name=source baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/source/ metalink=https://mirrors.openeuler.org/metalink?repo=$releasever&arch=source metadata_expire=1h enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/source/RPM-GPG-KEY-openEuler [update] name=update baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/update/$basearch/ metalink=https://mirrors.openeuler.org/metalink?repo=$releasever/update&arch=$basearch metadata_expire=1h enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/OS/$basearch/RPM-GPG-KEY-openEuler [update-source] name=update-source baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/update/source/ metalink=https://mirrors.openeuler.org/metalink?repo=$releasever/update&arch=source metadata_expire=1h enabled=1 gpgcheck=1 gpgkey=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/rc6_openeuler-2023-06-29-20-25-36/source/RPM-GPG-KEY-openEuler
Tips: 正式版发布后可以跳过上述修改步骤
安装
openeuler-ros包,这个包的作用是帮助配置 ROS humble 的软件源dnf install openeuler-ros
安装完成后需要修改
/etc/yum.repos.d/openEulerROS.repo文件,改为一下内容[openEulerROS-humble] name=openEulerROS-humble baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/openeuler-2023-06-29-20-25-36/EPOL/multi_version/ROS/humble/$basearch/ enabled=1 gpgcheck=0 [openEulerROS-humble-source] name=openEulerROS-humble-source baseurl=http://121.36.84.172/dailybuild/EBS-openEuler-22.03-LTS-SP2/openeuler-2023-06-29-20-25-36/EPOL/multi_version/ROS/humble/source enabled=1 gpgcheck=0
Tips: 正式版发布后可以跳过上述修改步骤
现在就可以安装需要的 ros 包啦!
使用
dnf install ros-humble-xxx就可安装指定的 ros 软件包# 以小乌龟(ros-humble-turtlesim)为例 dnf install ros-humble-turtlesim
image-20230630191602955
如果不介意安装全家桶的话,可以使用 dnf install ros-humble-* 来安装目前源里的所有 ros humble 软件包。
跑个 demo 康康?
#安装 `ros-humble-demo-nodes-cpp` 包 dnf install ros-humble-demo-nodes-cpp # 配置环境 source /opt/ros/humble/setup.sh # 分别执行以下两条命令
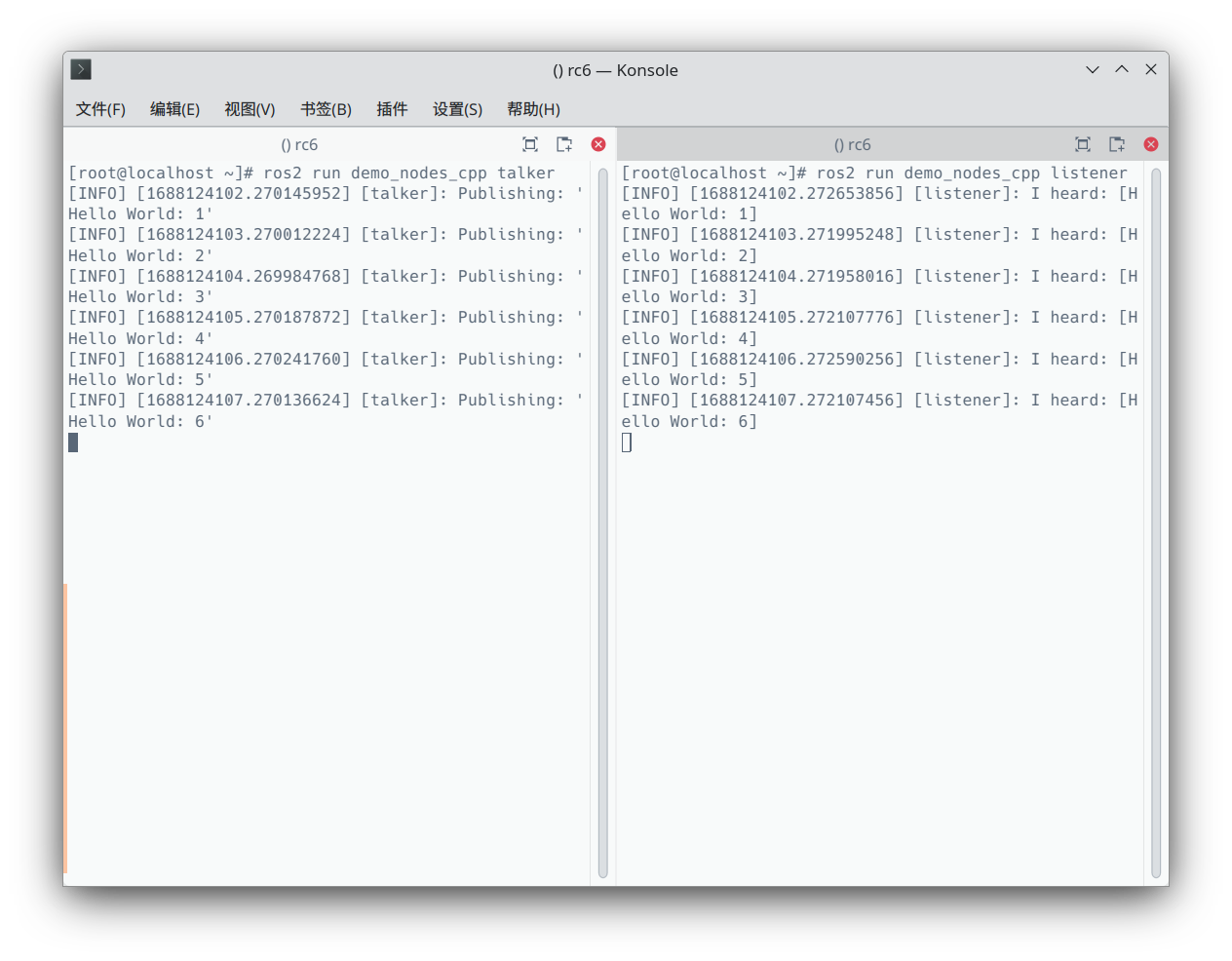
image-20230630192153082